产品中心
平面三自由度精密定位平台,包括输出平台、基座、三个柔顺机构、三个压电驱动器、三个驱动器定位装置、三个位移传感器和控制器。本实用新型由于三个柔顺机构以及三个位移传感器沿输出平台中心向外呈 120°角分布,保证了运动传递的无间隙、无摩擦、免润滑、高精度性和高稳定性,并且提高了输出平台移动的直线度;由于采用了柔顺机构,不仅使得输出平台能同时提供X、Y方向平移,Z方向旋转,而且使得输出平台和基座都在同一层次上;采用压电陶瓷驱动器作为压电驱动器,保证了驱动源的高精度运动输出和快的响应速度,具有纳米级的分辨率和亚微米级的定位精度。本实用新型可广泛应用于精密定位领域。
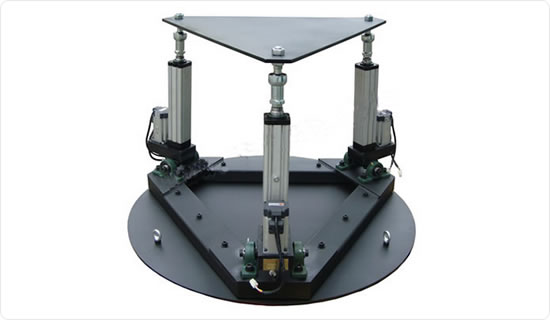
1:系统组成 三自由度平台系统是由三自由度运动平台、计算机控制系统、驱动系统等组成。下平台安装在地面的固定基座基上,上平台为支撑平台。计算机控制系统通过PLC控制驱动器从而控制电机以协调控制电动缸的行程,实现运动平台的三个自由度的运动,。 各主要部分简述如下: 1)运动平台 上平台:连接需要被模拟动作的机构 上铰链:双回转轴的虎克铰结构,用于连接上平台与电动缸的活塞杆。 下铰链:单虎克铰结构,用于连接固定基座与电动缸的筒体。 下平台:安装固定基座。 2)计算机控制系统硬件 运动控制计算机(伺服控制单元):实现平台系统启动/停止、接收上位机发来的位姿控制信息、对电动缸进行运动控制、监控伺服电机驱动器的工作状态、监控系统的运动状态、完成故障处理以及安全保护工作。 信号调理单元:完成与平台系统运动状态相关的各种传感器信号、测试信号和数字I/O信号的调理,以及伺服驱动器的驱动等。 3)系统控制软件 运动控制计算机的软件包括运动控制软件和逻辑控制软件。 2:系统工作原理 平台的控制系统为分层控制结构,监控单元负责人机界面交互,接受用户操作指令。并将控制信号下达给实时控制计算机。 首先,用户输入期望的运动参数(运动平台位姿、速度或加速度),如X向正弦运动。该运动参数传输给运动控制计算机,运动计算机通过运动学反解计算出六个电动缸的运动参数(电动缸位移量);然后,运动计算机根据三支电动缸运动参数和三个电动缸的位移反馈量,驱动三个伺服驱动器,实现三个电动缸闭环位置控制,使三个电动缸达到所要求的位移量,那么运动平台也就达到了所期望的运动姿态。 三自由度运动平台,由于有极为广阔的应用前景,三自由度运动平台是由三支 油缸,上、下各三只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六只油缸的伸缩运动,完成上平台在空间三个自由度(X,Y,Z)的运动,从而可以模拟出各种空间运动姿态,可广泛应用到各种训练模拟器如飞行模拟器、舰艇模拟器、海军直升机起降模拟平台、坦克模拟器、汽车驾驶模拟器、火车驾驶模拟器、地震模拟器以及动感电影、娱乐设备等领域,甚至可用到空间宇宙飞船的对接,空中加油机的加油对接中。在加工业可制成六轴联动机床、灵巧机器人等。由于三自由度运动平台的研制,涉及机械、液压、电气、控制、计算机、传感器,空间运动数学模型、实时信号传输处理、图形显示、动态仿真等等一系列高科技领域,因而三自由度运动平台的研制变成了高等院校、研究院所在液压和控制领域水平的标志性象征。
|
 解决方案
解决方案 服务与支持
服务与支持